где ![]() – матрица-строка,
– матрица-строка,
![]() – вектор-столбец.
– вектор-столбец.
Полученные здесь формулы (4), (6) полностью характеризуют одномерный симплекс элемент. Они являются общими пригодными для решения любых задач, включающих одномерные прямолинейные конечные элементы.
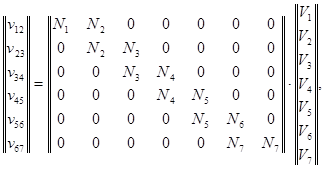
Третий этап – объединение конечных элементов в ансамбль. Основу этого этапа составляет замена номеров узлов i и j в уравнении (5) на номера, присвоенные узлам в процессе разбиения рассматриваемой области. Для примера, приведенного на рис. 1, будем иметь:
![]()
Полученная система уравнений представляет собой математическую модель исследуемой задачи. Запишем эту систему в расширенной форме:
 (7)
(7)
что соответствует векторной записи модели
![]() (7а)
(7а)
Четвертый этап – определение вектора узловых значений функции. Этот этап не является формальным, и мы не можем ограничиться ссылкой на рис. 5.1 абстрактного примера. Нужно знать конкретное дифференциальное уравнение или конкретный функционал исследуемого явления.
Допустим, что в нашем примере этот функционал имеет простейший вид:
![]() (8)
(8)
Разобьем пределы интегрирования в соответствии с делением области на конечные элементы, тогда

Первый член подынтегрального выражения определим, возведя в квадрат равенство (5), второй – путем его дифференцирования с учетом обозначений (4). Выполняя интегрирование и простейшие преобразования, можем записать:
![]() (9)
(9)
где

Для того, чтобы определить минимум функционала (9), приравняем нулю частные производные, предварительно развернув выражения сумм для всех шести конечных элементов и заменяя индексы i, j номерами соответствующих узлов:
![]()
![]()
Таким образом, получена следующая система уравнений:
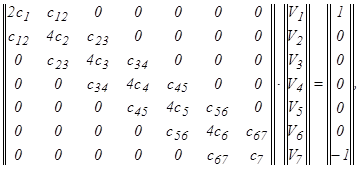
или
![]() . (10)
. (10)
Матрицу С называют матрицей жесткости, а вектор ![]() – вектором нагрузок. Эти названия пришли из строительной механики. Они отвечают сущности рассматриваемых там задач, поскольку МКЭ первоначально был разработан и в основном сформировался применительно к расчетам строительных конструкций. Затем метод конечных элементов был распространен на другие предметные области, а термины строительной механики сохранились и стали общепринятыми, хотя и отражали иную физическую сущность.
– вектором нагрузок. Эти названия пришли из строительной механики. Они отвечают сущности рассматриваемых там задач, поскольку МКЭ первоначально был разработан и в основном сформировался применительно к расчетам строительных конструкций. Затем метод конечных элементов был распространен на другие предметные области, а термины строительной механики сохранились и стали общепринятыми, хотя и отражали иную физическую сущность.
Дальнейший расчет сводится к обращению матрицы С и определению вектора ![]() . Зная компоненты вектора
. Зная компоненты вектора ![]() и используя систему уравнений (7), можно вычислить значение искомой функции в любой точке. Таким образом, задача полностью решена.
и используя систему уравнений (7), можно вычислить значение искомой функции в любой точке. Таким образом, задача полностью решена.
Выше было отмечено, что узловые значения функции определяются дифференциальным уравнением задачи или условием минимизации некоторого функционала. В ряде случаев эти операции не требуется выполнять в явном виде. Можно использовать какой-нибудь другой принцип, отвечающий физической сущности задачи. Так, используя уравнения метода перемещений при расчете строительных конструкций, мы автоматически минимизируем функционал энергии системы, поскольку канонические уравнения указанного метода являются следствием такой минимизации.
При рассмотрении примера (рис. 1) конечная задача состояла в определении функции ![]() . Часто такая функция может быть лишь промежуточным звеном между координатой х и другой переменной, подлежащей определению. Так, уравнение изогнутой оси балки интересует нас не как геометрический объект конфигурации системы, а как функция, позволяющая вычислить изгибающие моменты и поперечные силы или нормальные и касательные напряжения. В таком случае соответствующие зависимости между этими величинами могут быть включены в состав конечных элементов и в их ансамбль.
. Часто такая функция может быть лишь промежуточным звеном между координатой х и другой переменной, подлежащей определению. Так, уравнение изогнутой оси балки интересует нас не как геометрический объект конфигурации системы, а как функция, позволяющая вычислить изгибающие моменты и поперечные силы или нормальные и касательные напряжения. В таком случае соответствующие зависимости между этими величинами могут быть включены в состав конечных элементов и в их ансамбль.
15.2 Сети одномерных конечных элементов
На рис. 3 приведены примеры из различных предметных областей с одинаковой топологией с точки зрения теории графов, имеющие одинаковый принцип построения математической модели на основе МКЭ.
На рис. 3, а показана электрическая схема из семи резисторов. Источники питания на схеме не показаны, но их влияние характеризуется токами ![]()
Если резистор ![]() рассмотреть изолированно от системы, то с помощью закона Ома можно записать соотношение между исходящими токами
рассмотреть изолированно от системы, то с помощью закона Ома можно записать соотношение между исходящими токами ![]() и напряжениями
и напряжениями ![]() на его концах:
на его концах:
![]() (11)
(11)
или в матричной форме
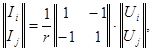 (12)
(12)
![]() (12 а)
(12 а)
Узлы сети и ее элементы можно нумеровать произвольно, однако при выделении каждого элемента условимся под индексом i всегда понимать меньший номер. Нетрудно видеть, что ![]() поэтому силу тока в узле i можно определять по формуле
поэтому силу тока в узле i можно определять по формуле
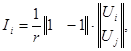 (13)
(13)
а если рассматривается узел ![]() , то правую часть формулы (13) следует умножить на -1.
, то правую часть формулы (13) следует умножить на -1.
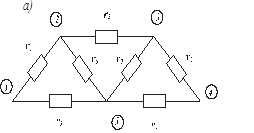
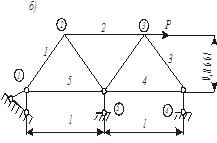
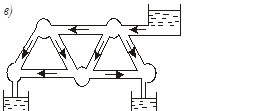
а) электрическая; б) механическая; в) гидравлическая
Рис. 3 Сети одномерных конечных элементов:
При составлении ансамбля конечных элементов запишем уравнения «равновесия» (закон Кирхгофа) поочередно для каждого узла. Для формализации процедуры будем рассматривать все элементы сети независимо от того, примыкают они к данному узлу или нет. Если элемент примыкает к рассматриваемому узлу своим началом, будем принимать равенство (13) со своим знаком, т. е. умножать его на 1. Если это окажется конец элемента, то будем вводить множитель – 1. Если элемент не примыкает к узлу, то принимать множитель 0. С целью сокращения записей условимся матрицу жесткости обозначать буквой К, снабженной индексом, указывающим номер элемента. Для первого узла (рис. 3, а) будем иметь: