Введение
В радиолокационных системах для измерения угловых координат используются парциальные приемные каналы в угломестной плоскости. Точность измерения угловых координат зависит от идентичности амплитудно-фазовых характеристик парциальных приемных каналов. В свою очередь, идентичность характеристик определяется разбросами коэффициентов усиления приемных каналов и фазовыми ошибками, а также характеристиками антенн. Существуют трудности обеспечения высокой точности идентичности и стабильности амплитудно-фазовых характеристик приемных каналов. С целью обеспечения идентичности и стабильности амплитудно-фазовых характеристик парциальных приемных каналов вводится коррекция межканального рассогласования.
В связи с тем, что изменение параметров парциальных приемных каналов происходит медленно, коррекция межканального рассогласования осуществляется во время «молчания» РЛС, то есть при отсутствии излучения.
Наибольшее влияние на разброс характеристик в приемных каналах оказывают собственные шумы приемного тракта радиолокационной станции. Стабилизация мощности шумов на выходе аналоговой части приемного тракта осуществляется чаще всего с помощью шумовой автоматической регулировки усиления (ШАРУ). В настоящее время при выборе схем реализации ШАРУ предпочтение отдают цифровым вариантам.
Большинство универсальных устройств обладают недостаточным быстродействием и не всегда позволяют достичь требуемой скорости вычислений в реальном масштабе времени, что вызывает необходимость построения специализированных систем обработки сигналов, например с использованием программируемых логических интегральных схем (ПЛИС).
Анализ экспериментальных результатов эффективности стабилизации мощности шума, полученных в процессе исследования работы различных систем ШАРУ показал, что главное различие между рассмотренными системами ШАРУ заключается в способе и точности оценки значения мощности огибающей шума.
1. Анализ исходных данных и рассмотрение вариантов алгоритма
Анализ исходных данных
Проанализируем исходные данные (ИД), приведённые выше. Целью работы стоит разработка цифровой части системы шумовой автоматической регулировки усиления с применением современной элементной базы с диапазоном регулирования -6 дБ +6 дБ. Предъявляются следующие требования к параметрам входного сигнала и системы в целом:
разрядность входного сигнала – 12 (старший разряд – знак);
тактовая частота 24 МГц, синхросигнал с длительностью 0,83 мкс и периодом 15 мс;
при использовании квадратурных составляющих сигнала для расчета, темп их следования 1,2 МГц;
при использовании аналогового аттенюатора для регулировки, необходимо вырабатывать четырехразрядный код аттенюации, соответствующий диапазону от -6 дБ до +6 дБ с шагом 0,75 дБ;
логические уровни напряжения соответствуют транзисторно-транзисторной логике (ТТЛ).
Тактовая частота, разрядность входного сигнала, логические уровни напряжения и параметры синхросигнала являются не корректируемыми параметрами, которые обусловлены исходными данными, в том числе и на смежные системы. В то же время можно задать масштабируемость тех или иных параметров, облегчив тем самым внедрение системы ШАРУ в другие или модернизируемые изделия.
Аналоговый аттенюатор, описанный в исходных данных, выполняет две основные задачи:
поддержание уровня напряжения входного сигнала в рамках диапазона работы АЦП;
является исполнительным элементом системы ШАРУ.
Вариант построения системы ШАРУ с применением аналогового аттенюатора имеет ряд недостатков:
жестко заданный диапазон и довольно большой (0,75 дБ) шаг регулирования, который ограничивает точность подстройки;
большее влияние внешних факторов на точность подстройки;
более высокие массогабаритные и ценовые показатели.
В связи с вышеизложенным, целесообразно рассмотреть вариант, разработки цифровой системы ШАРУ без использования аналогового аттенюатора, при условии выполнения требований, указанных в ИД.
Анализ принципов адаптивной фильтрации
Как сказано выше, разрабатываемая в данной работе система необходима для регулировки уровня сигнала входного тракта таким образом, чтобы свести мощность шума в каналах на выходе системы к одинаковому значению. Это достигается путем измерения мощности шума в каждом канале и подстройки коэффициента передачи, таким образом, чтобы выполнялись данные требования. Можно сказать, что коэффициент передачи адаптируется под текущую шумовую обстановку в каждом канале в отдельности. Таким образом, данную систему можно свести к цифровому регулятору, построенному на основе адаптивного фильтра [1], [2].
На рисунке 1.1 представлена структурная схема адаптивного трансверсального фильтра порядка L.
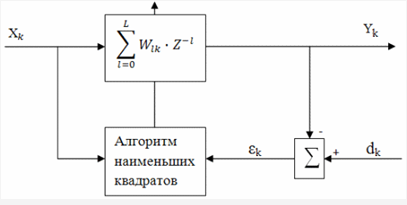
Рисунок 1.1 Структурная схема адаптивного трансверсального фильтра
На рисунке 1.1 выходной сигнал Yk представляется в виде линейной комбинации дискретных отсчетов входного сигнала Xk и весовых коэффициентов Wlk (1.1):
![]() , (1.1)
, (1.1)
где l – номер весового коэффициента, k = 1,2…L - номер временного отсчета, Z-l – задержка на один такт.
В процессе адаптации осуществляется корректировка коэффициентов Wlk таким образом, чтобы выходной сигнал Yk фильтра имел наилучшее приближение к эталонному сигналу dk. Для этого формируется сигнал ошибки εk = dk - Yk, и вектор весовых коэффициентов оптимизируется так, чтобы обеспечить минимальное среднеквадратическое значение ошибки, то есть СКО = Е[εk] = min.
Текущее значение W вычисляется по методу наименьших квадратов (1.2):
![]() , (1.2)
, (1.2)
где ![]() – параметр, определяющий устойчивость и скорость процесса адаптации.
– параметр, определяющий устойчивость и скорость процесса адаптации.
Для устойчивой работы адаптивного фильтра необходимо выполнение следующего условия (1.3):
![]() , (1.3)
, (1.3)
где М - относительная погрешность адаптации (0<M<1), а E[xk2] – мощность входного сигнала. Время сходимости алгоритма адаптации, то есть время сходимости СКО ошибки к минимальному значению определяется по выражению (1.4):
![]() , (1.4)
, (1.4)
где Т0 – интервал квантования сигналов по времени.
Из приведенных соотношений (1.2), (1.3), (1.4) видно, что чем выше требования к точности фильтра, тем меньше должен быть коэффициент ![]() . В свою очередь, уменьшение значения
. В свою очередь, уменьшение значения ![]() приводит к увеличению времени сходимости системы. Выбор величины
приводит к увеличению времени сходимости системы. Выбор величины ![]() осуществляется путем принятия компромиссного решения.
осуществляется путем принятия компромиссного решения.
Таким образом, стоит задача синтеза цифрового автоматического регулятора мощности шума, основной качественной характеристикой которого является его точность. Время сходимости коэффициента передачи к оптимальному значению является менее важным параметром, в виду большого запаса времени, выделенного для подстройки системы. Так же, процесс изменения собственного шума является довольным медленным процессом. Следующий параметр, это сложность алгоритма в реализации, который важен, но ввиду использования современной элементной базы не является главным. Очевидно, что при примерно равной точности, надо сделать выбор в сторону более простого решения, так как это сократит время разработки и упростит отладку системы.