В качестве примера работы автоматического регулятора на рисунке 2.4 приведена эпюра шума на его выходе во время подстройки для случая при S*2. Закон распределения шума близок к нормальному закону распределения с нулевым средним. На рисунке 2.8 с нулевого по 1999 отсчет регулятор отключен, а с 2000 по 8000 отсчет проводится автоматическая регулировка мощности шума.
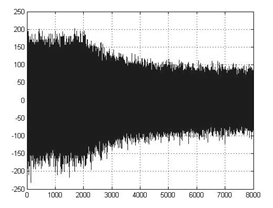
Рисунок 2.8 Вид выходного сигнала автоматического регулятора для входного воздействия S*2
В данной главе было проведено математическое моделирование алгоритмов, рассмотренных в первой главе. Были показаны их достоинства и недостатки. Сделан вывод, что алгоритмы, использующие для расчета дисперсию входного и выходного шума, превосходят по точности алгоритмы, использующие для расчета среднеквадратическое отклонение входного и выходного шума. Так же было установлено, что, в случае алгоритма, использующего дисперсию, использование для расчета квадратурных составляющих выходного сигнала, не влечет за собой повышения точности.
В результате проведенного математического моделирования для реализации системы шумовой автоматической регулировки усиления был выбран, алгоритм, использующий для подстройки коэффициента передачи регулятора дисперсии входного и выходного сигналов, разработана его структурная схема. Было проведено математическое моделирование алгоритма, демонстрирующее корректность его функционирования.
3. Синтез системы ШАРУ
Особенности проектирования
Синтез системы автоматического регулирования мощности шума будет производиться в САПР Quartus II 9.0. Данная программная среда имеет достаточно большой набор модулей, упрощающих разработку и анализ синтезированных устройств. САПР поддерживает разработку модулей в графическом редакторе наряду с описанием модулей на языках описания аппаратуры, например, Verilog Hardware Description Language (Verilog HDL). Данная среда имеет встроенные средства моделирования и средства оценки временных задержек при синтезе схемы под определенный кристалл ПЛИС. Описанные средства будут использованы при синтезе разрабатываемого устройства.
Ввиду особенностей разработки и простоты последующей поддержки проектов удобно реализовать верхний уровень проекта ПЛИС в виде графической схемы, объединяющей модули, использующие встроенные функции либо модули, разработанные на языке описания аппаратуры.
Таким образом, результатом данного раздела будет являться разработанный модуль системы ШАРУ, реализованный в виде кода на языке Verilog HDL.
Синтез блока устройства ШАРУ
В соответствии со структурной схемой алгоритма (рисунок 2.5) была разработана функциональная схема модуля, приведенная в приложении В.
Из приведенной функциональной схемы видно, что при работе, во время отсутствия сигнала разрешения enable, на вход IN поступают дискретные отсчеты шума, умножаются на масштабированный коэффициент передачи (TRANS_COEF) и делятся на масштабирующий коэффициент N. В результате на выход с некоторой задержкой поступают отрегулированные отсчеты шума. Данная задержка обусловлена в основном длительностью операции умножения. Деление в данном случае не вносит задержку, так как оно осуществляется сдвигом на n разрядов. Это допустимо в связи с выбором масштабирующего коэффициента N = 2n. Все остальные элементы схемы в данном случае не функционируют.
При установке сигнала разрешения в активный уровень, схема начинает функционировать полностью. Одновременно для входа и выхода системы проводится расчет средней мощности шума (дисперсии) DISP_IN и DISP_OUT. Он производится путем накопления K квадратов отсчетов с последующей нормировкой на количество накопленных отсчетов K. Далее вычисляется сигнал ошибки DISP_ERROR путем нахождения отклонения дисперсии на выходе DISP_OUT от эталонного значения DIPS_ET. Производится масштабирование полученного коэффициента путем его умножения на масштабированный коэффициент скорости сходимости алгоритма наименьших квадратов SPEED_COEF. Далее производится нормировка полученного значения относительно значения мощности шума на входе DISP_IN. В результате данных операций, получена масштабированная корректировка коэффициента передачи TRANS_COEF_CORR. Данная поправка вносится в действующий коэффициент передачи TRANS_COEF, что в результате определяет его новое значение.
При длительном повторении данных процедур производится регулировка коэффициента TRANS_COEF таким образом, чтобы дисперсия выходного шума DISP_OUT стала близка к эталонному значению DISP_IN.
При переводе сигнала enable в пассивный уровень, вся схема, кроме умножителя 1 и схемы деления на N, «замрет» и далее входной сигнал будет регулироваться последним рассчитанным коэффициентом передачи, остающимся неизменным до следующего разрешения регулировки.
Необходимо определить внешний вид модуля, то есть его входы и выходы. Входами модуля являются:
тактовый сигнал CLK;
12 разрядный вход данных IN[11 0];
сигнал enable, в рамках которого будет производиться оценка мощности шума и корректировка значения коэффициента передачи.
Выходными сигналами являются:
12 разрядный выход данных OUT[11 0];
коэффициент передачи TRANS_COEF[15 0].
Удобно параметризировать ширину шин данных (WIDTH) и коэффициента передачи(n). Изменяемые коэффициенты (количество усредняемых отсчетов 2k и эталонная дисперсия DISP_ET) также удобно задать в виде внешних (изменяемых при создании копии модуля) параметров. Внешний вид графического модуля представлен на рисунке 3.1.
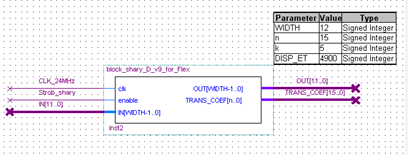
Рисунок 3.1 Внешний вид графического модуля, реализующего работу ШАРУ
Параметризация модуля позволит упростить процесс встраивания модуля в то или иное изделие, посредством изменения разрядности используемых данных. Возможность простого изменения эталонного уровня дисперсии позволит оперативно адаптировать систему к переносу для работы в другом приемном тракте или с другим аналогово-цифровым преобразователем, где уровень шума может отличаться.
Описание входных и выходных регистров и параметров внутри модуля выглядит следующим образом:
module block_shary #(parameter
WIDTH = 12, //входное слово 11 + знак в прямом коде
n = 15, //значение единичного коэффициента передачи
// т.е. для W = 1 – Wq = 2^n
k = 5, // кол-во усреднений 2^k
DISP_ET = 4900) // CКО=70, DISP=70^2
( input clk, enable,
input [WIDTH-1:0] IN,
output reg [WIDTH-1:0] OUT,
output reg [n:0] TRANS_COEF );//transmission coefficient
В описании параметров указываются значения «по умолчанию», при создании копии модуля они будут выставлены в качестве параметрах, но их можно изменить при необходимости.
Следующая группа необходимых параметров – локальные параметры. Они задаются и используются только в пределах модуля. Как видно, они могут зависеть от внешних параметров.
localparam N = 1 << n, //2^n