W (σц) = (1/<σц>) ехр ( — σц/<σц>).
где <σц> - среднее значение ЭПР.
Диаграммы обратного излучения кораблей имеют более тонкую лепестковую структуру, чем диаграммы самолетов, что объясняется значительно большими размерами и сложной конструкций кораблей. Отражающие элементы корабля многочисленны и разнообразны, поэтому корабль также можно рассматривать как группу элементов, отражения от которых имеют случайные фазы.
Экспериментальные исследования показывают, что флюктуации ЭПР корабля приближенно описываются также экспоненциальным законом распределения.
Данные о законах распределения амплитуд сигналов или ЭПР необходимы для расчета дальности действия РЛС и обоснования методики обработки сигналов. Сведения о функции корреляции и спектра флюктуации кроме того важны при определении точности измерения координат.
При практической оценке дальности действия радиолокационной станции прежде всего обычно пользуются средним значением ЭПР <σц> Эту величину можно получить усреднением значений <σц> для различных направлений падения облучающей волны. В таблице приведены средние значения ЭПР различных реальных целей, полученные в итоге обобщения большого числа измерений на волнах сантиметрового диапазона. Пользуясь этими величинами, можно произвести вычисления средних значений дальности обнаружения различных целей.
|
Тип радиолокационной цели |
σц, м2 |
|
Истребитель Средний бомбардировщик Дальний бомбардировщик Транспортный самолет Крылатая ракета Головная часть баллистической ракеты Крейсер Транспорт малого тоннажа Транспорт среднего тоннажа Транспорт большого тоннажа Траулер Малая подводная лодка в надводном состоянии Рубка подводной лодки Катер Человек |
3-5 5-20 10—50 До 50 0,3—0,8 10-3— 1,0 14000 150 7500 15000 750 140 1 100 0,8 |
Объемно-распределенные цели
В радиолокационной практике часто встречаются отражения от объемно-распределенных целей, состоящих из большого числа отражающих элементов, относительно близко расположенных друг к другу и занимающих значительную область пространства. Отражающие элементы, принимающие участие в формировании суммарного сигнала, распределяются в пределах некоторого объема V (отражающий объем), определяемого разрешающей способностью РЛС по угловым координатам и дальности
Определить эффективную площадь рассеяния объемно-распределенной цели в предположении, что элементарные отражатели обладают различными значениями σi довольно трудно. Поэтому будем считать, что элементарные отражатели, заполняющие объем V, имеют одинаковые ЭПР, равные σц.
Предположим, что элементарные отражатели распределены в пространстве равномерно с плотностью n0, Тогда в объеме содержится N = n0V отражателей, а их средняя ЭПР
<σц>=n0σ0V
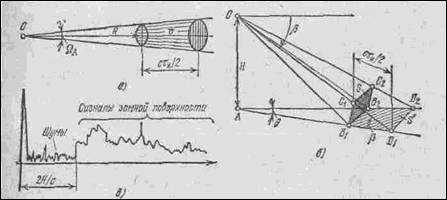
Рис.2.2. К определению характеристик объемных (а) и поверхностных (б) целей.
Подставляя в это выражение значение объема цилиндра с основанием ΩAR2 и высотой сτ/2, получаем формулу для вычисления средней ЭПР объемно-распределенной цели
<σц>=n0σ0 ΩAR2сτ/2,
с учетом того, что телесный угол антенного луча ΩA выражается через эффективную площадь А или или коэффициент направленного действия антенны D, получаем
<σц>=2πn0σ0 R2сτ/D,
из которой следует характерная особенность объемно-распределенных целей: зависимость эффективной площади рассеяния от параметров РЛС Тд и D, а также от расстояния между станцией и целью.
Полученные соотношения позволяют оценить среднее значение мощности результирующего сигнала объемно-распределенной цели. Амплитуда результирующего сигнала меняется, так как отдельные отражатели все время изменяют свое положение относительно друг друга. Благодаря этому результирующий сигнал, воспринимаемый приемником РЛС в следующих один за другим периодах повторения, флюктуирует во времени по случайному закону.
Следует иметь в виду, что длительность сигнала, отраженного от объемно-распределенной цели, может значительно превышать длительность излучаемого импульса и определяется радиальной протяженностью объемной цели. По мере распространения излученного импульса отражения образуются от новых областей объемно-распределенной цели.
Если внутри объема, заполненного распределенными отражателями, находится какой-либо объект (например, самолет), то радиолокационное наблюдение за ним затрудняется. Отражения от объемно-распределенной цели в данном случае являются помехой, которая будет маскировать полезный сигнал. Условия наблюдения полезного сигнала можно характеризовать отношением мощностей сигнала и помехи. Величина отношения мощности сигнала, отраженного от цели, к средней мощности сигнала, обусловленного объемно-распределенными отражателями, равняется отношению их эффективных площадей:
![]()
Из данной формулы следует, что для повышения эффективности выделения полезных сигналов на фоне отражений от объемно-распределенной цели целесообразно уменьшать длительность импульса и сужать диаграмму направленности антенны.
На практике наиболее часто приходится встречаться с отражениями от гидрометеоров. Для дождя, средний диаметр капель которого d0 величина σц=300d06/λ4 и отношение сигнал/помеха
![]()
Отражение электромагнитных волн от гидрометеоров может быть использовано в интересах метеорологии в качестве полезных сигналов. С их помощью можно определить местоположение атмосферных образований, их интенсивность, а иногда и направление перемещения.
Поверхностно-распределенные цели
Примерами поверхностно-распределенных целей являются: травяной покров, лес, кустарник, пашня, волны на водной поверхности. В отличие от объемно-распределенных целей в данном случае трудно выделить отдельные отражающие элементы. Располагаясь случайным образом, они образуют сплошной поверхносnный слой, от которого происходит рассеянное отражение электромагнитных волн.
Предположим, что в точке О (рис. 2.3, б) на высоте Н над поверхностью земли находится самолет. Антенный луч имеет в горизонтальной плоскости ширину θ и облучает на поверхности земли сектор AD1D2.
Будем считать, что РЛС излучает импульсы длительностью τи. Даже при неподвижной антенне облучение поверхности в секторе AD1D2 происходит не одновременно. Первый отраженный сигнал приходит через время τ= 2Н/с после зондирующего импульса (рис. 2.3, в). Далее, несмотря на импульсный характер излучения, на вход приемника РЛС непрерывно поступают отраженные сигналы. Это объясняется тем, что по мере распространения излученной волны отраженная волна возвращается от все более удаленных участков поверхности. Поскольку поверхность непрерывна, будет непрерывен и сигнал на входе приемника. В каждый данный момент времени действующий на вход приемника сигнал является результатом сложения сигналов, отраженных от элементарных отражателей, случайным образом расположенных в пределах разрешаемой площадки поверхности.